在COMSOL Multiphysics的仿真建模中,坐标系是连接几何模型、物理场设置与求解结果的核心桥梁。无论是简单的矩形结构仿真,还是复杂的旋转机械、球对称场分析,选择合适的坐标系都能大幅简化建模流程、提升求解效率,甚至避免因坐标不匹配导致的仿真失真。
COMSOL默认提供了便捷的自带坐标系,同时支持多种自定义坐标系,满足不同场景的建模需求。今天就来全面拆解这些坐标系——从最基础的笛卡尔坐标系、边界坐标系,到常用的自定义旋转坐标系、球坐标系、柱状坐标系,结合实操场景讲清用法、区别与适用场景,帮你快速上手,少走弯路。
一、自带坐标系:COMSOL的“默认工具箱”
COMSOL启动后会自动加载基础坐标系,无需手动创建,开箱即用,主要包括笛卡尔坐标系和边界坐标系,覆盖大多数基础仿真场景。
1. 笛卡尔坐标系(Cartesian Coordinate System):全局通用的“标准基准”
笛卡尔坐标系是COMSOL的默认全局坐标系,也是最基础、最常用的坐标系,几乎所有仿真的初始基准都基于它,相当于建模的“地面坐标系”。
它以三条相互垂直的直线(X轴、Y轴、Z轴)为基准,遵循右手定则,通过(x, y, z)三个坐标值唯一确定空间中任意一点的位置——x对应水平方向,y对应垂直方向,z对应垂直于xy平面的方向(三维场景)。在二维场景中,则简化为(x, y)二维坐标,z轴默认为垂直于平面的方向。
【核心特点】:结构简单、直观易懂,坐标与几何模型的直角边、平行边界天然匹配,计算效率高,是COMSOL中所有坐标系的基础参考。COMSOL默认将其作为全局坐标系,用于指定材料属性、载荷和约束,在流体域和边界条件中,它通常被视为空间固定坐标系;而在固体材料属性设置中,其坐标轴会固定在材料上,成为材料坐标系。
【适用场景】:适用于几何形状规则、边界平行于坐标轴的模型,比如矩形腔体、长方体结构、平板换热器、直角管道等。例如仿真一块矩形金属板的热传导、一个长方体电容器的电场分布,直接使用默认的笛卡尔坐标系即可,无需额外设置,建模效率最高。
【实操小贴士】:新建模型后,笛卡尔坐标系会自动显示在“定义-坐标系”节点下,默认名称为“Cartesian 1”,原点默认在(0,0,0)。若需调整原点位置或坐标轴方向,可右键编辑,修改“原点”和“轴方向”参数,适配非对称模型的基准需求。
2. 边界坐标系(Boundary Coordinate System):贴合边界的“局部助手”
边界坐标系是COMSOL专为边界条件设置设计的“局部坐标系”,它并非独立的全局坐标系,而是依附于模型的边界(面、线、点)存在,随边界的形状和方向自动适配,无需手动定义坐标轴方向。
其核心逻辑是:以边界的法向、切向为坐标轴——对于二维边界(线),边界坐标系的一个轴沿边界切向,另一个轴沿边界法向;对于三维边界(面),则会生成两个切向轴和一个法向轴,精准贴合边界的几何姿态。COMSOL会自动生成边界坐标系相关的内置变量,方便用户调用。
【核心特点】:与边界“绑定”,坐标轴方向随边界形状变化(如曲面边界的法向会随曲面曲率变化),无需手动计算方向向量,能极大简化边界条件的设置。尤其在处理斜切面、曲面边界时,可避免复杂的矢量分解操作。
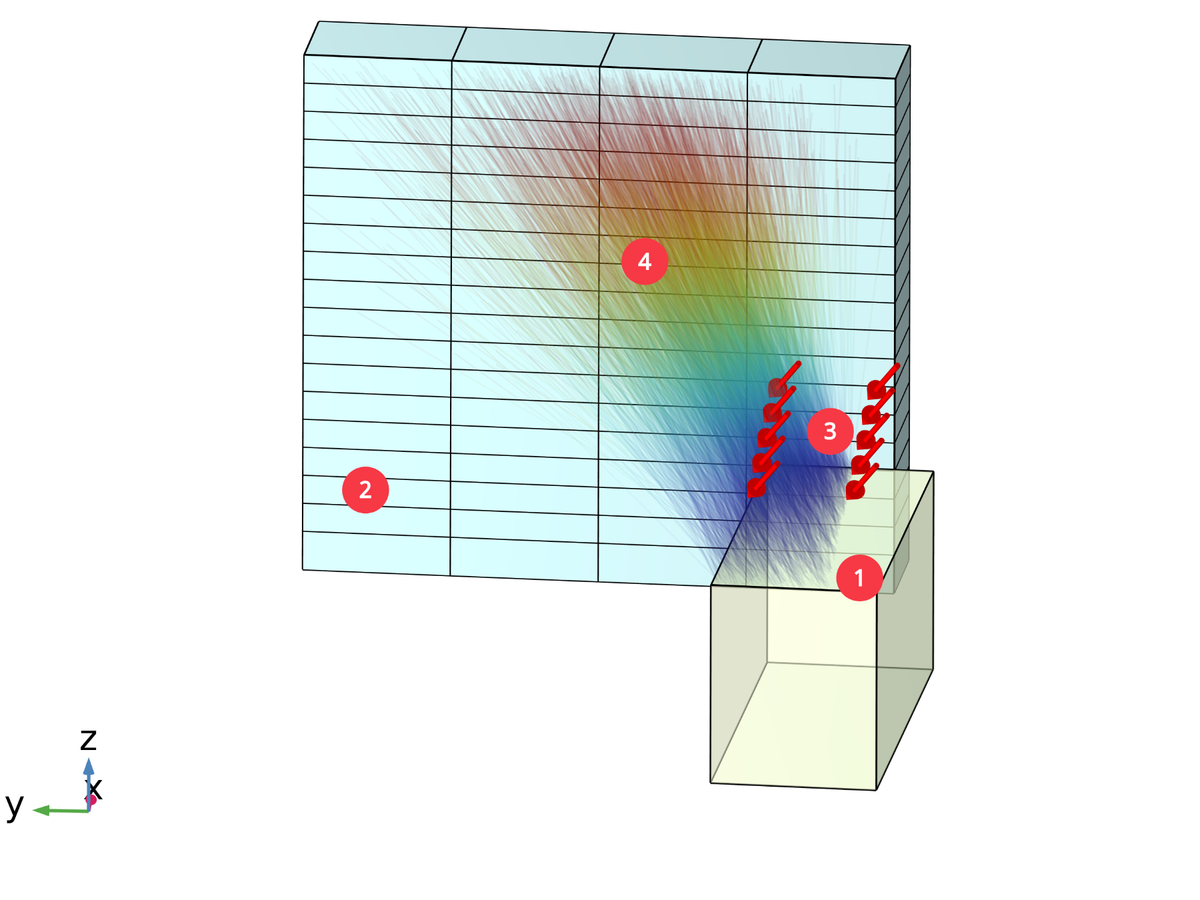
【适用场景】:主要用于边界条件的精准施加,尤其是需要沿边界法向、切向施加载荷、约束或物理场的场景。比如:给倾斜的平面施加法向压力、给曲面边界施加切向位移、在弯曲管道内壁施加切向流速等。
【实操小贴士】:无需手动创建边界坐标系,当你在某个边界上设置物理条件(如载荷、约束)时,COMSOL会自动识别该边界的坐标系。在边界条件设置面板中,可通过“坐标系”下拉框选择“边界坐标系”,即可直接沿边界的法向、切向设置参数,无需分解到全局笛卡尔坐标系的坐标轴上,大幅减少计算量。
二、自定义坐标系:应对复杂场景的“灵活武器”
当自带坐标系无法满足复杂模型需求(如旋转结构、对称结构、非正交边界)时,COMSOL支持手动创建多种自定义坐标系,其中最常用的包括旋转坐标系、球坐标系、柱状坐标系(圆柱坐标系),此外还有基矢坐标系、组合坐标系、映射坐标系、缩放坐标系、复合系统等,可适配更细分的复杂建模场景。自定义坐标系的核心优势是“适配模型几何”,让物理场设置更贴合实际场景,同时提升求解收敛性。
当自带坐标系无法满足复杂模型需求(如旋转结构、对称结构、非正交边界)时,COMSOL支持手动创建多种自定义坐标系,其中最常用的就是旋转坐标系、球坐标系和柱状坐标系(圆柱坐标系)。自定义坐标系的核心优势的是“适配模型几何”,让物理场设置更贴合实际场景,同时提升求解收敛性。
1. 旋转坐标系(Rotated Coordinate System):适配旋转与倾斜场景
旋转坐标系是通过将全局笛卡尔坐标系绕某一轴旋转一定角度得到的自定义坐标系,坐标轴依然保持相互垂直,只是方向发生了旋转,相当于“把全局坐标系掰到需要的角度”,是最常用的自定义坐标系之一。
在COMSOL中创建旋转坐标系时,需指定“旋转轴”(如X轴、Y轴、Z轴,或自定义轴)和“旋转角度”(单位为弧度或度);在三维模型中,还可通过欧拉角(z-x-z约定)实现更复杂的空间旋转,精准调整坐标系的空间姿态。
【核心特点】:坐标轴保持正交,与全局笛卡尔坐标系同属直角坐标系,只是方向不同,可完美适配倾斜、旋转的几何结构,无需对物理场参数进行复杂的矢量分解。它属于相对坐标系,其坐标轴方向会随全局坐标系或指定参考系变化,上下文依赖性与全局笛卡尔坐标系一致。
【适用场景】:适用于几何结构倾斜、需要沿特定方向施加物理条件,或模型存在旋转运动的场景。比如:倾斜的梁结构、与全局坐标轴成一定角度的管道、旋转的叶轮(需模拟旋转运动时)、斜面上的位移施加等。
【实操案例】:若需在一个与X轴成30°角的斜面上施加沿斜面方向的位移,无需将位移分解为X、Y方向的分量,可直接创建一个绕Z轴旋转30°的旋转坐标系,然后在该坐标系下,沿新的X轴(贴合斜面方向)设置位移,操作更简洁、不易出错。
2. 柱状坐标系(Cylindrical Coordinate System):旋转对称模型的“最优解”
柱状坐标系(又称圆柱坐标系)是针对旋转对称结构设计的坐标系,核心是“以一条中心轴为基准”,用三个参数(r, θ, z)描述空间点的位置,对应“径向、周向、轴向”三个方向,完美适配圆柱类结构。
各参数的含义的是:r(径向)——点到中心轴的垂直距离;θ(周向)——点在垂直于中心轴的平面内,与参考方向的夹角;z(轴向)——点沿中心轴的距离,与笛卡尔坐标系的Z轴方向一致。其与笛卡尔坐标系的转换关系为:x = r cosθ,y = r sinθ,z = z,参数范围为r∈(0,+∞)、θ∈(0,2π)、z∈ℝ。
【核心特点】:天生适配旋转对称结构,可将三维问题简化为二维问题(当物理场沿周向均匀分布时,θ方向无变化,可忽略θ维度),大幅减少计算量,提升求解效率。需要注意的是,在二维轴对称几何中,COMSOL会默认使用柱状坐标系,无需手动创建。
【适用场景】:所有旋转对称的模型,比如:圆柱形容器、管道、轴类零件、旋转电机、天线辐射场、长直导线的电磁仿真等。例如仿真圆柱管道内的流体流动,使用柱状坐标系时,可直接设置径向流速、周向流速,无需分解到X、Y轴,且能利用对称性简化模型维度。
【实操小贴士】:创建柱状坐标系时,需指定“中心轴”(通常选择模型的旋转中心轴,如Z轴),COMSOL会自动生成r、θ、z三个坐标轴。若模型为二维轴对称结构,无需手动创建,软件会默认启用柱状坐标系,直接在该坐标系下设置物理参数即可。
3. 球坐标系(Spherical Coordinate System):球对称模型的“专属工具”
球坐标系是针对球对称结构设计的坐标系,以一个中心点(原点)为基准,用三个参数(r, θ, φ)描述空间点的位置,对应“径向、方位角、极角”三个方向,适配球体、球面类结构。
各参数的含义的是:r(径向)——点到原点的直线距离;θ(方位角)——点在xy平面内的投影与X轴的夹角;φ(极角)——点与原点的连线与Z轴的夹角。其与笛卡尔坐标系的转换关系为:x = r sinφ cosθ,y = r sinφ sinθ,z = r cosφ,参数范围为r∈(0,+∞)、θ∈(0,2π)、φ∈(0,π)。
【核心特点】:适配球对称结构,可将三维问题简化为一维问题(当物理场沿方位角、极角均匀分布时,仅需考虑径向r的变化),求解效率极高。坐标面为球面、圆锥面和半平面,能直观描述球对称物理场的分布规律。
【适用场景】:球对称或近似球对称的模型,比如:球体电容器、球形催化剂、原子轨道计算、行星运动轨迹、点电荷的电场、声波传播等。例如仿真球形物体的热辐射,使用球坐标系时,可直接设置径向的热流密度,无需考虑复杂的空间方向分解,且能精准反映物理场沿径向的变化规律。
【实操小贴士】:创建球坐标系时,需指定“原点”(通常选择球体的球心),COMSOL会自动生成r、θ、φ三个坐标轴。若物理场沿θ、φ方向无变化,可在求解设置中勾选“轴对称”或“球对称”,进一步简化模型,减少计算量。
4. 基矢坐标系(Basis Coordinate System):自定义方向的“精准基准”
基矢坐标系是通过自定义基矢(单位向量)来确定坐标轴方向的坐标系,核心是“摆脱默认正交约束”,可创建正交或非正交的坐标系,适配非规则几何结构的方向需求,是自定义坐标系中灵活性较强的一种。
在COMSOL中创建基矢坐标系时,需手动指定三个线性无关的基矢(e₁、e₂、e₃),可通过输入向量坐标、选择几何边/轴作为基矢方向,或通过函数定义动态基矢。若基矢相互垂直且为单位向量,即为正交基矢坐标系,与笛卡尔坐标系类似;若基矢非正交,则为非正交基矢坐标系,适用于特殊物理场分析。
【核心特点】:基矢可自由定义,支持正交与非正交设置,能精准匹配复杂几何的特殊方向,无需依赖全局坐标系的坐标轴,可直接沿自定义基矢方向设置物理参数,减少矢量分解误差。
【适用场景】:非规则几何、需要沿特定非正交方向施加载荷或物理场的场景,比如:斜交网格模型、非正交结构的应力分析、晶体结构仿真(贴合晶体晶格方向)、自定义方向的流体流动模拟等。
【实操小贴士】:创建基矢坐标系时,需确保三个基矢线性无关(不可共面),否则无法生成有效坐标系。若需创建正交基矢,可勾选“正交化”选项,软件会自动将输入的基矢处理为正交单位向量,简化设置。
5. 组合坐标系(Combined Coordinate System):多坐标系的“协同工具”
组合坐标系是将多个已创建的坐标系(自带或自定义)进行组合,通过设定权重或切换条件,实现不同坐标系的协同工作,核心是“按需切换坐标系”,适配模型不同区域的差异化需求。
其核心逻辑是:将多个坐标系作为子坐标系,通过自定义切换规则(如空间位置、几何区域、求解步骤),让模型在不同场景下自动调用对应的坐标系。例如,可将笛卡尔坐标系与柱状坐标系组合,让模型的直角区域使用笛卡尔坐标系,旋转对称区域使用柱状坐标系,无需拆分模型。
【核心特点】:可整合多个坐标系的优势,无需拆分模型即可适配不同区域的几何特征,简化复杂模型的建模流程,同时保证各区域物理场设置的精准性,避免坐标系切换导致的误差。
【适用场景】:多区域、多几何特征的复杂模型,比如:既有直角结构又有旋转对称结构的混合模型、分区施加不同物理场的仿真(如部分区域热传导、部分区域流体流动)、大型装配体的局部精细仿真等。
【实操小贴士】:创建组合坐标系前,需先创建所有需要组合的子坐标系,然后在“组合坐标系”设置中添加子坐标系,定义切换规则(如按几何域选择、按坐标范围选择),软件会自动根据规则调用对应子坐标系。
6. 映射坐标系(Mapped Coordinate System):适配映射几何的“专属工具”
映射坐标系是与映射几何(如映射网格、拉伸几何、旋转映射几何)绑定的坐标系,核心是“跟随映射几何的变形或映射关系”,让坐标系与几何的映射规律保持一致,适用于映射类几何的仿真分析。
它的本质是将原始坐标系(如笛卡尔坐标系)通过映射函数,转换为贴合映射几何的坐标系,映射函数可根据几何的拉伸、旋转、缩放等映射关系自动生成,也可手动定义映射规则,确保坐标系的坐标轴与几何的映射方向同步。
【核心特点】:与映射几何深度绑定,坐标系随几何映射关系变化,能精准反映映射几何的空间分布规律,简化映射区域的物理场设置,提升求解收敛性,尤其适合映射网格的精细化仿真。
【适用场景】:映射几何模型,比如:拉伸形成的棱柱结构、旋转映射形成的回转体结构、网格映射后的复杂曲面模型、分层结构的局部映射仿真等。例如,拉伸形成的异形管道,使用映射坐标系可直接沿拉伸方向设置流速,贴合几何映射规律。
【实操小贴士】:创建映射坐标系时,需先创建映射几何或映射网格,然后在“映射坐标系”设置中选择映射几何/网格,软件会自动生成映射函数,无需手动定义复杂的映射关系,若需调整,可手动修改映射参数。
7. 缩放坐标系(Scaled Coordinate System):适配缩放几何的“比例工具”
缩放坐标系是通过对原始坐标系(通常为笛卡尔坐标系)进行缩放变换得到的自定义坐标系,核心是“调整坐标比例”,让坐标系的单位长度与模型的几何尺寸、物理场尺度相匹配,避免因尺度差异导致的求解误差。
在COMSOL中创建缩放坐标系时,需指定缩放基准坐标系(如全局笛卡尔坐标系)和三个坐标轴的缩放因子(x、y、z方向可分别设置不同缩放比例),缩放因子大于1为放大,小于1为缩小,等于1为不缩放,可实现不均匀缩放。
【核心特点】:可灵活调整坐标比例,适配不同尺度的模型(如微观尺度与宏观尺度结合的模型),让物理场参数的数值范围更合理,提升求解精度,同时简化参数设置(无需统一单位尺度)。
【适用场景】:多尺度模型、尺寸差异较大的模型、需要调整坐标比例的仿真场景,比如:微观晶体结构与宏观构件的耦合仿真、微小器件(如芯片)与大型装配体的联合仿真、不同单位尺度的物理场耦合(如纳米尺度与毫米尺度)。
【实操小贴士】:缩放坐标系的缩放因子需结合模型尺寸和物理场尺度设置,避免缩放比例过大或过小导致数值溢出。若模型为均匀缩放,可设置三个坐标轴的缩放因子相同;若为不均匀缩放,可分别设置各方向的缩放比例,贴合几何实际尺寸。
8. 复合系统(Composite System):多物理场耦合的“综合坐标系”
复合系统并非单一坐标系,而是将多个坐标系、物理场模块进行整合,形成的一套协同工作的坐标系体系,核心是“适配多物理场耦合仿真”,解决不同物理场坐标系不兼容的问题,实现多场协同求解。
其核心逻辑是:以一个主坐标系为基准,整合多个子坐标系(对应不同物理场),通过坐标转换规则,实现不同物理场之间的坐标同步,确保多物理场耦合时的参数传递准确无误。例如,结构力学仿真使用旋转坐标系,流体仿真使用柱状坐标系,通过复合系统可实现两个坐标系的无缝耦合,无需手动进行坐标转换。
【核心特点】:支持多坐标系、多物理场的协同,自动完成不同坐标系之间的转换,简化多物理场耦合的建模流程,避免因坐标不兼容导致的耦合误差,提升多场求解的效率和精度。
【适用场景】:多物理场耦合仿真,比如:流固耦合(流体用柱状坐标系、固体用旋转坐标系)、热电耦合(电场用笛卡尔坐标系、温度场用映射坐标系)、电磁-结构耦合等复杂多场仿真场景。
【实操小贴士】:创建复合系统时,需先确定主坐标系和各子坐标系(对应不同物理场),然后在“复合系统”设置中定义各坐标系之间的转换规则,软件会自动完成多坐标系的协同,确保多物理场参数传递准确。
三、坐标系选择核心技巧:避坑指南+高效适配
很多新手在建模时会陷入“随便选坐标系”的误区,导致建模复杂、求解缓慢甚至结果失真。其实选择坐标系的核心原则很简单:让坐标系贴合模型几何形状和物理场分布,优先简化模型维度、减少参数分解 。结合实操经验,总结3个关键技巧:
优先使用自带坐标系:简单模型(直角、平面)直接用笛卡尔坐标系;边界条件需沿边界法向、切向设置时,用边界坐标系,无需手动创建,省时省力。
旋转对称用柱状坐标系,球对称用球坐标系:这两类模型用对应坐标系,可大幅简化维度(3D→2D、3D→1D),不仅建模更快,求解效率也会提升50%以上,避免用笛卡尔坐标系导致的冗余计算。
倾斜、旋转结构用旋转坐标系:无需分解物理参数,直接贴合结构方向设置,减少计算错误,尤其适合多方向倾斜、三维旋转的复杂模型,可通过欧拉角实现精准定位。
非规则、特殊方向用基矢坐标系:若模型存在非正交方向需求或需贴合特殊结构(如晶体),优先使用基矢坐标系,可自定义基矢方向,精准匹配物理场设置需求。
多区域混合模型用组合坐标系:模型包含多种几何特征(如直角+旋转对称),无需拆分模型,用组合坐标系整合不同子坐标系,按区域自动切换,简化建模流程。
映射/缩放几何用对应坐标系:映射几何适配映射坐标系,多尺度模型适配缩放坐标系,让坐标系与几何特征、尺度完全匹配,提升求解精度。
多物理场耦合用复合系统:多场仿真(如流固耦合、热电耦合)时,用复合系统整合不同物理场的坐标系,自动完成坐标转换,避免耦合误差。
四、总结:坐标系是仿真效率的“隐形推手”
COMSOL中的坐标系看似繁杂,实则逻辑清晰:自带坐标系(笛卡尔、边界)负责基础场景,自定义坐标系(旋转、柱状、球、基矢、组合、映射、缩放坐标系及复合系统)负责不同细分的复杂场景,核心都是“适配模型、简化操作、提升效率”。
新手建议从自带坐标系入手,熟悉其用法后,再逐步尝试各类自定义坐标系——先判断模型的几何特征(是否旋转对称、球对称、倾斜、映射)、尺度需求及物理场类型,再选择对应的坐标系,避免盲目使用全局笛卡尔坐标系。
其实只要找对坐标系,很多复杂的建模问题都会迎刃而解。后续会继续分享COMSOL坐标系的进阶用法(如多坐标系切换、坐标系耦合、各类自定义坐标系的实操案例),关注我,一起解锁COMSOL仿真的高效技巧~